





伺服电机基础
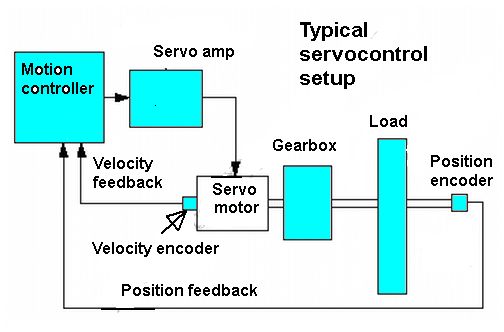
在功能上,伺服电机和步进电机重叠。两者都可以将其轴旋转一圈,并保持该位置一段由外部控制器确定的时间长度。步进电机是几种特定的定位电机结构中的一种,而伺服控制是指一种控制类型,涉及反馈有关电机轴位置的信息并将其用于电机操作的控制中。几种电机都可以用作伺服器,包括最简单的有刷直流电机。
从某种意义上说,三相大功率感应电机可以与带有编码器反馈的某些变频驱动器(VFD)一起作为伺服器运行;一些较新的VFD将感应电机移动到一个位置并保持它,因此从技术上讲,它们可以称为伺服控制。但是,感应电机使用鼠笼型结构,其中定子和转子均为缠绕型以产生磁通量。与永磁电刷或无刷电机相比,这些电机产生的磁通密度较小。因此,永磁电机优选用于伺服系统,因为它们可以比鼠笼型电机更快地响应加速或减速。
尽管价格便宜且易于实现,但步进电机并未在伺服应用中普遍使用,因为如果过载,步进电机可能会失去同步性。这是因为步进器通常是开环运行的,没有电机轴位置的反馈,可以用来补偿指令位置太阳网集团8722际电机轴位置之间的误差。
如果出现同步丢失,则必须备份步进电机,并且必须在控制器,电机和负载太阳网集团8722新设置角度对准。相比之下,带有光学,霍尔效应或其他传感器来传递负载位置的伺服系统可提供连续的负载位置反馈。如果电机轴位置滞后于指令位置,则纠错功能可立即确保纠正该位置错误。
控制器可以使用各种算法与电机通信。使用最广泛的是比例积分微分(PID)。它是一种太阳网集团8722协议,也广泛用于非电气应用中。像许多成功的太阳网集团8722一样,它出现在19世纪的最后十年。为了建造一种用于海上的自动转向装置,工程师观察并记录了专业舵手在海上暴风雨期间的行动。将转向模式编码为PID算法。
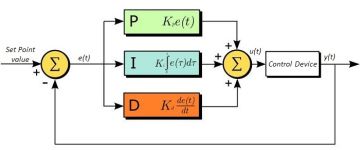
如Thor Labs所述的PID算法。比例指的是当前误差(例如,如果您看到更多误差,请按比例应用更多校正)。积分是过去错误的记录。衍生产品面向未来,误差被视为变化率的函数。分配适用于预期用途的加权值,控制器将合成一个连续修改的信号,以调整传送到电机的电流。这就是孩子骑自行车的方式。
在伺服电机控制中,脉宽调制(PWM)是一种出色的节能算法。通常的电缆布线方案是将控制器连接到电机的三根电线。颜色编码各不相同,但常见的布置是红色代表功率,黑色代表接地,白色代表脉宽调制方波控制信号。
脉冲宽度的宽度而不是振幅或频率,而是控制电机的速度。旋转方向和重定位到中心位置也由脉冲控制。此信息在控制信号中而不是在电源中传输。电机上的固态电路对于解释PWM信号必不可少。
TAG 伺服电机
