





定子相数如何影响步进电机性能?
当电流施加到定子中的线圈时,步进电机将以不连续的步进运动。台阶的大小部分地由定子中的相数确定。通常,定子相位越多,基本步进角越小,电机的分辨率越高。
步进电机具有三种基本结构形式:永磁体,可变磁阻和混合动力。永磁步进电机具有永磁转子,而可变磁阻类型的齿转子则由软铁制成。混合式步进电机使用带有铁齿的永磁转子,将永磁体和可变磁阻类型的特征结合在一起。
混合式步进电机最常用于工业应用,部分原因是它的基本步距角小,产生的转矩更高,并且与永磁体或可变磁阻设计相比具有更好的保持转矩和制动转矩。本讨论着重于混合式步进电机设计。
混合式步进电机的定子由带齿的磁极组成,每个磁极都有一个绕组。相由通过绕组连接的极组成。当电流施加到一个相上时,该相中的每个极都会被激励和磁化。彼此相对的180度磁极以相同的极性磁化。
混合式步进电机的转子由两部分组成,通常称为“杯子”。每个杯子有50个齿,一个杯子上的齿被磁化为北极,而另一个杯子上的齿被磁化为南极。极,总共100极(50个极对)。当定子通电时,转子运动,使其齿与定子的磁化齿对齐。转子随每个电流脉冲移动的量定义为步距角。
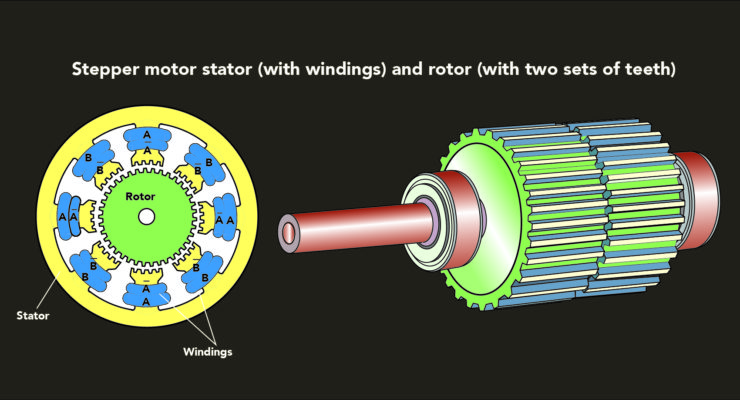
混合式步进电机的转子由两个“杯”组成,每个杯通常有50个齿。两个杯子偏移1/2齿距,一个杯子上的牙齿向北极化,而另一个杯子上的牙齿向南极化,总共100极或50极对。
磁极是磁化体内磁通集中的区域。极对是一个北极和一个南极的组合。
混合式步进电机通常根据定子中的相数进行分类,大多数混合式步进电机具有2相或5相。
两相步进电机通常每相有八个极或四个极(两个极对)。定子相通电后,转子将移动四分之一的齿距,以与通电的定子磁极对齐。由于转子有50个齿并一次移动1/4个齿距,因此电机每转200步,基本步距角为1.8度。
步进角= 360÷(2 *#个定子相*#个转子极对)
步距角= 360÷(2 * 2 * 50)= 1.8度
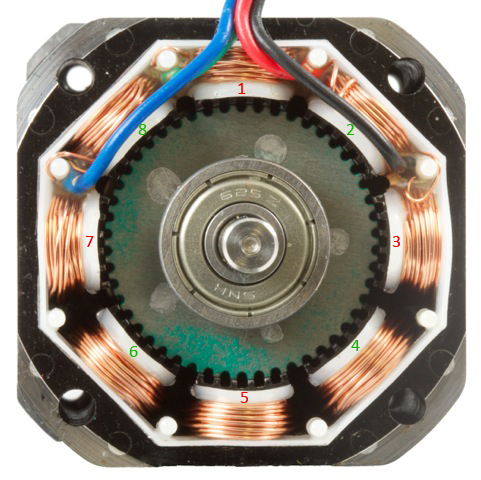
这个两相步进器有八个极点。一相由奇数极(1、3、5和7)组成,另一相由偶数极(2、4、6和8)组成。前转子杯有50个齿,后转子杯(未显示)也有50个齿,与前杯偏移1/2个齿距。
图片来源:Phidgets
5相步进电机每相有十个极,或两个极(一对极)。在这种配置中,转子仅需移动齿距的十分之一即可与通电的定子磁极对齐。通过使50个转子齿每步移动1/10齿距,五相电机每转进行500步,因此基本步角为0.72度。
步距角= 360÷(2 * 5 * 50)= 0.72度
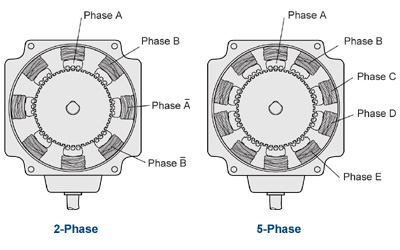
比较一个8极的2相步进电机(左)和一个10极的5相步进电机(右)。
图片来源:美国太阳网集团8722汽车公司
5相步进电机的较小步距角提供了比2相设计更高的分辨率,微步控制可以产生更高的分辨率。(请注意,准确性运动是由电机的机械精度,这取决于马达结构中使用的组件的质量和所用的用于制造和组装的方法测定。)
尽管更高的分辨率是具有更多定子相位的步进电机的固有优势,但使用更高相位电机(例如5相vs 2相)的主要原因是,更多的相(因此步进越小)产生的转矩越小波纹和更多可用扭矩。定子相位更多且步进角更小的另一个好处是,电机由于过冲或过冲而不太可能错过步进,从而使其在开环运行中更加可靠。
TAG 步进电机
